This continues our saga we started at Part I (spoiler alert: you’re probably better off with a Schlieren). Thanks to a good discussion with my graduate school friend Serdar Seckin, I got curious about applying the same sensitivity criterion to a shadowgraph system. Turns out, Settles’ book also has the equations for contrast in the case of a shadowgraph (equation 6.10). It is even simpler, since the contrast is a purely geometrical relation:
Where is the distance between the “screen” (or camera focal plane, in case of a focused shadowgraph) and the Schlieren object. Since the ray deflection occurs in the two directions perpedicular to the optical axis ( and ), we get a contrast in the direction () and another in the direction (). The actual contrast seen in the image ends up being the sum of the two:
Since the ray deflection is dependent on the Schlieren object (as discussed in Part I), we can plug its definition to get:
Which is the “Laplacian” form of the Shadowgraph sensitivity. Laplacian between quotes, since it does not depend on the derivative. We can plug in the Gladstone-Dale relation and the ideal gas law to isolate the pressure Laplacian:
Replacing the traveling wave form , now obviously considering the two-dimensional wavenumber in the directions perpendicular to the optical axis:
Where is the squared wavenumber vector magnitude, projected in the plane. Applying the same criterion of levels for minimum contrast, we get the following relation for the minimum detectable pressure wave:
Which we can easily convert to minimum based on the wave frequency :
design consequences
The boxed formula for shadowgraph is very similar to the one for Schlieren found in Part 1. By far, the most important point is the dependence on [Shadowgraph] instead of [Schlieren]. This is obvious, since Schlieren detects first derivatives of pressure, whereas Shadowgraph detects second derivatives, popping out an extra factor.
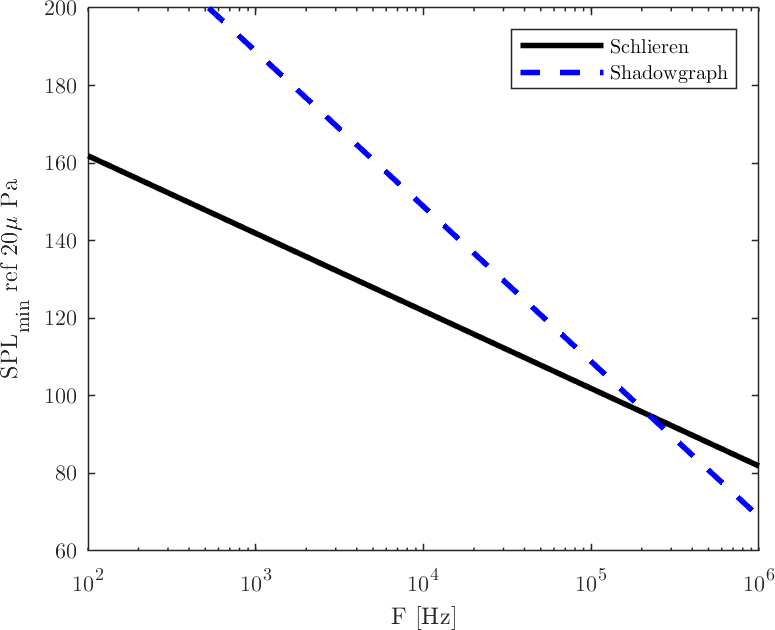
From a detector apparatus perspective, however, this is not of the most desirable features: The shadowgraph acts as a second-order high-pass spatial filter, highlighting high frequencies and killing low frequencies. The Schlieren has a weaker, first-order high pass filtering behavior. But this means they have a crossing point, a frequency where the sensitivity is the same for both. The apparatus parameters are different, however we can do the exercise for the rather realistic apparatus given in Part 1. If we make m (i.e., the focal plane is 0.5 meters from the Schlieren object), we get the following curve for a 12-bit camera:
Minimum detectable sound levels – Schlieren versus Shadowgraph. Schlieren parameters: m, mm. Shadowgraph has m. Both consider and m.
If the news weren’t all that great for the Schlieren apparatus, the Shadowgraph is actually worse: The crossing point for this system occurs at kHz. There might be applications where these ultrasound frequencies are actually of interest, but I believe in most fluid dynamics problems the Schlieren apparatus is the to-go tool. Remembering that, even though I show SPL values above 170dB in this chart, the calculations considered a constant-temperature ideal gas, which is not the case anymore at those non-linear sound pressure levels.
With this, I’m declaring Schlieren a winner for sound-vis.
I'm a brazilian Mechanical Engineer and PhD, with research interests in aeroacoustics, flow control, flow diagnostics and heat transfer. In the past I've worked as a refrigeration systems designer and later as an R&D specialist at a refrigeration contracting company, researching for new products to push the industrial refrigeration market technologies forward. I then did my PhD at Florida State University in experimental aerodynamics, spending a couple years after as a postdoc working in supersonic jet noise production and other projects. In 2022, I moved to Los Alamos National Lab, where I developed 3D tomographic flow diagnostics for the Extreme Fluids group led by Dr. John Charonko. I am currently an Assistant Professor at Syracuse University (since 2024).
View all posts by Fernando Zigunov
2 thoughts on “Schlieren vs Shadowgraph for Sound Visualization – Part II”









![P=P_0 \exp(i[\omega t - \kappa_x x - \kappa_y y])](https://s0.wp.com/latex.php?latex=P%3DP_0+%5Cexp%28i%5B%5Comega+t+-+%5Ckappa_x+x+-+%5Ckappa_y+y%5D%29&bg=ffffff&fg=333333&s=0&c=20201002)
![\displaystyle P_0 = -\frac{\big(\nabla_{xy}^2 P \big)\exp(-i[\omega t - \kappa_x x - \kappa_y y])}{\kappa_x^2 + \kappa_y^2} = -\frac{\big(\nabla_{xy}^2 P \big) P \exp(-i[\omega t - \kappa_x x - \kappa_y y])}{\kappa_{xy}^2}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+P_0+%3D+-%5Cfrac%7B%5Cbig%28%5Cnabla_%7Bxy%7D%5E2+P+%5Cbig%29%5Cexp%28-i%5B%5Comega+t+-+%5Ckappa_x+x+-+%5Ckappa_y+y%5D%29%7D%7B%5Ckappa_x%5E2+%2B+%5Ckappa_y%5E2%7D+%3D+-%5Cfrac%7B%5Cbig%28%5Cnabla_%7Bxy%7D%5E2+P+%5Cbig%29+P+%5Cexp%28-i%5B%5Comega+t+-+%5Ckappa_x+x+-+%5Ckappa_y+y%5D%29%7D%7B%5Ckappa_%7Bxy%7D%5E2%7D&bg=ffffff&fg=333333&s=0&c=20201002)










 m,
m,  mm. Shadowgraph has
mm. Shadowgraph has  and
and  m.
m.

2 thoughts on “Schlieren vs Shadowgraph for Sound Visualization – Part II”