Tell me: Would you be excited to see sound? Well, I sure damn was when I first attempted to see the sound produced by an ultrasonic transducer! And still am, to be honest! So let’s learn how to do it with a Schlieren apparatus and the sensitivity considerations necessary in the design of a Schlieren optical system. For this, I’ll use my handy Schlieren and Shadowgraph techniques by no one else than the great Prof. Gary Settles. My PhD advisor, Prof. Alvi, was his PhD student – so I should get this right!
I’m a practical engineer, but I’ll derive the formulas in this section. If you want, you can skip ahead to the next section where I apply them and produce nice design charts.
the math
If you would like more details on the physics, please refer to Settles. This is more of a derivation section. We’ll start with the Gladstone-Dale law, which relates the index of refraction of a gas to its density:

Where 
![G(\lambda)=2.2244\times10^{-4}\big[1+(6.37132\times 10^{-8}/\lambda)^2\big] m^3/Kg](https://s0.wp.com/latex.php?latex=G%28%5Clambda%29%3D2.2244%5Ctimes10%5E%7B-4%7D%5Cbig%5B1%2B%286.37132%5Ctimes+10%5E%7B-8%7D%2F%5Clambda%29%5E2%5Cbig%5D+m%5E3%2FKg&bg=ffffff&fg=333333&s=0&c=20201002)

Assuming a parallel light beam, the beam deflection 


Where 

Where 



We can use the ideal gas law to combine the expressions as a function of 

We can then assume we are looking for sinusoidal sound waves of the form ![P(x,t)=P_0 \exp(i[\omega t - \kappa x])](https://s0.wp.com/latex.php?latex=P%28x%2Ct%29%3DP_0+%5Cexp%28i%5B%5Comega+t+-+%5Ckappa+x%5D%29&bg=ffffff&fg=333333&s=0&c=20201002)
![\displaystyle \frac{\partial P}{\partial x} = i\kappa P_0 \exp(i[\omega t - \kappa x])](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cfrac%7B%5Cpartial+P%7D%7B%5Cpartial+x%7D+%3D+i%5Ckappa+P_0+%5Cexp%28i%5B%5Comega+t+-+%5Ckappa+x%5D%29&bg=ffffff&fg=333333&s=0&c=20201002)
OK. Now let’s stop here for a while. I think it goes without saying you’ll probably need a high speed camera to see the sound waves, as they aren’t among the mundane things you can use your regular DSLR to observe. Given that, we can consider whichever camera you’ll use has some bit depth 





Let’s isolate 
![\displaystyle P_0 = \frac{\partial P}{\partial x} \frac{1}{\kappa} \underbrace{\big\{-i\exp(-i[\omega t - \kappa x])\big\}}_{\text{included in } N_{lv}} = RT \frac{1}{\kappa} \frac{1}{G(\lambda)} \frac{a}{f_2} \frac{n_0}{L} C](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+P_0+%3D+%5Cfrac%7B%5Cpartial+P%7D%7B%5Cpartial+x%7D+%5Cfrac%7B1%7D%7B%5Ckappa%7D+%5Cunderbrace%7B%5Cbig%5C%7B-i%5Cexp%28-i%5B%5Comega+t+-+%5Ckappa+x%5D%29%5Cbig%5C%7D%7D_%7B%5Ctext%7Bincluded+in+%7D+N_%7Blv%7D%7D+%3D+RT+%5Cfrac%7B1%7D%7B%5Ckappa%7D+%5Cfrac%7B1%7D%7BG%28%5Clambda%29%7D+%5Cfrac%7Ba%7D%7Bf_2%7D+%5Cfrac%7Bn_0%7D%7BL%7D+C&bg=ffffff&fg=333333&s=0&c=20201002)
Using our bit depth, we get the minimum pressure disturbance to be:

Converting to sound pressure level (


Evaluating the 


A capital 


usage in design
The boxed formula is extremely useful for sound visualization design, as it allows us to define whether we can even see the sound waves we want to. First, a few remarks: I separated the bit depth because the 



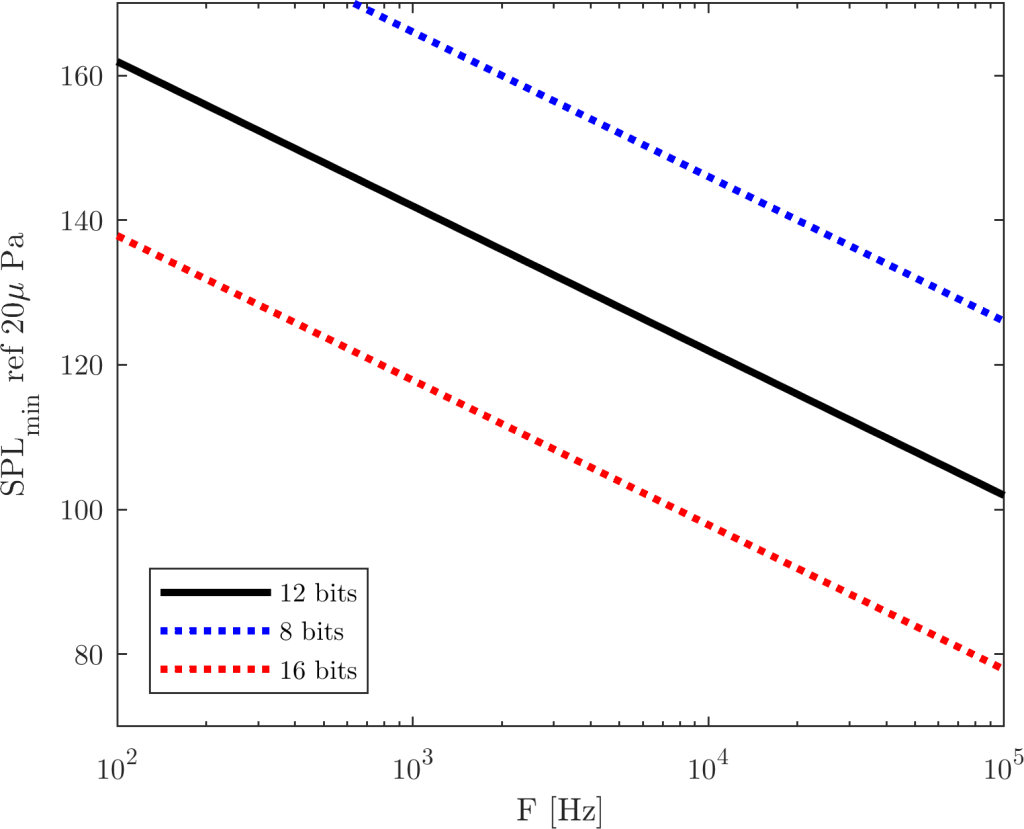
Note that the minimum SPL is inversely proportional to the frequency
 m,
m,  mm,
mm,  m and
m and 
The black line represents the bit depth of most contemporary scientific cameras. As you can see, the news aren’t that great: For low frequencies, we have to scream really loud to see anything – and this is after blowing up the image such that we can only see 5 levels! For example, for a frequency of 5kHz we have about 128dB of minimum sound pressure level to be perceived by our camera. It’s not impossible, and with the advent of new data processing techniques like POD it is well feasible. But wouldn’t it be great to have 4 more bits per pixel (red dashed line)? That would bring the minimum SPL to 104dB, which would enable the visualization of a lot of phenomena (and even a rock concert!).
Well, I hope this helps you design your own Schlieren apparatus. Or maybe you lose hope altogether and quit – but at least this saved you time! If you want to design your own Schlieren setup to visualize sound waves, you can download the code that generated the chart above here. Anyhow, here’s a little video of how sound waves look like for a really loud (~140dB, ~5kHz) supersonic jet:

2 thoughts on “Seeing Sound Waves with your Schlieren apparatus – Part I”